Drawing Robot
Arduino, Coding & Robotics

Das Projekt
Der Kurs „Make your own tools“ beschäftigt sich mit der frage, wie die von uns verwendeten Werkzeuge unsere Arbeiten prägen und beeinflussen.
Deshalb sollen selbst Werkzeuge entworfen, gebaut und getestet werden, die einen interessanten und ansprechenden visuellen Output erzeugen. Dabei lag der Fokus insbesondere auf dem arbeiten und experimentieren mit verschiedenen Materialen und fertigungsverfahren wie dem Lasern und 3D Drucken.
 01
01
 02
02
 03
03
 04
04
-
01
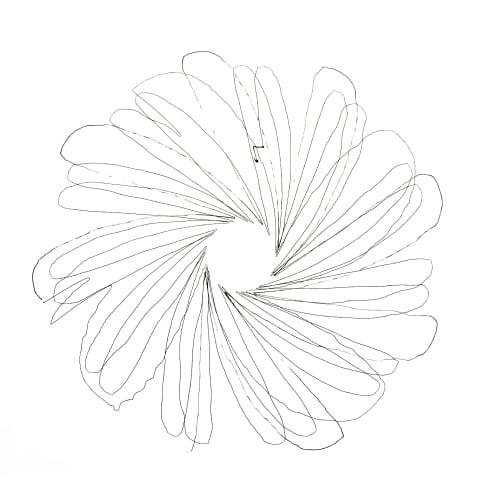
Ergebnis Prototyp 03 -
02
Ergebnis Prototyp 04 -
03
Ergebnis Prototyp 03 -
04
Ergebnis Prototyp 03
Idee & Prototypen
Es soll eine Art Roboter / Penplotter gebaut werden, der das Prinzip eines Plattenspielers umdreht. Anstatt auf der (Schall-) Platte eingeprägte Information auf die Nadel / den Arm zu übertragen, wird mit einem Stift und durch Bewegung des Arms auf die Platte gezeichnet. Durch Variation der Bewegung von Arm und Plattenteller sowie Typ, Farbe und Druck des Stiftes können viele unterschiedliche Varianten erzeugt werden.
Durch die verwendung eines Arduinos ab Prototyo 02 und dadurch gesteuerte Stepper- bzw Servomotoren kann der Arm sowie die Platte präzise gesteuert und programmiert werden, sodass reproduzierbare ergebnisse entstehen.
 05
05
 06
06
 07
07
 08
08
 09
09
 10
10
 11
11
 12
12
-
05
Prototyp 01 -
06
Ergebnis Prototyp 01 -
07
Ergebnis Prototyp 01 -
08
Prototyp 02 -
09
Ergebnis Prototyp 03 -
10
Prototyp 03 -
11
Ergebnis Prototyp 02 -
12
Ergebnis Prototyp 02
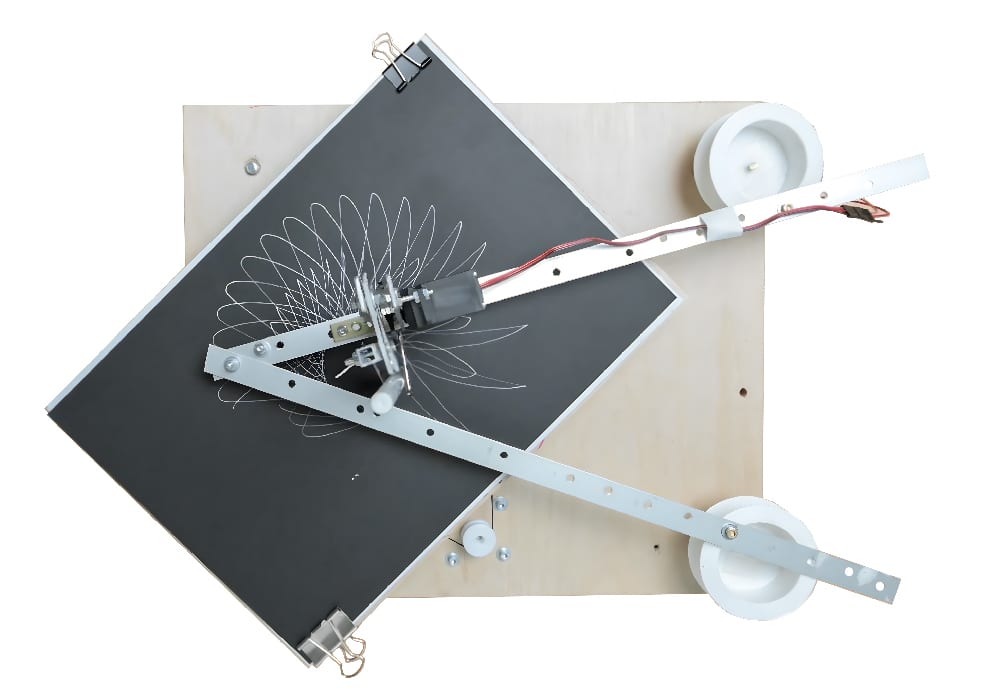
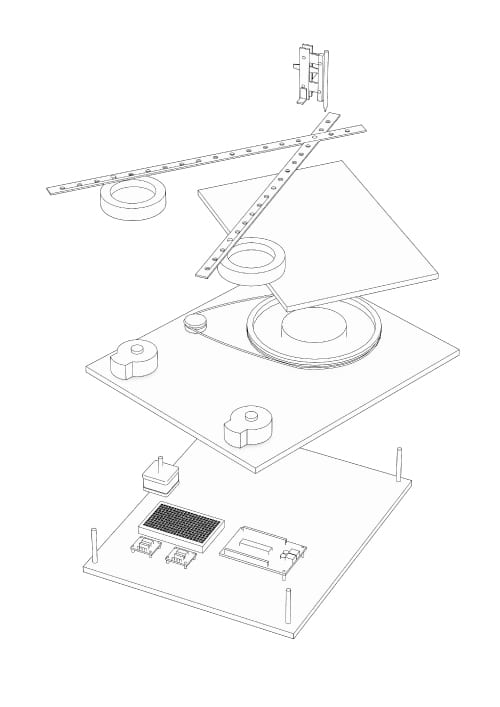
Finale Version
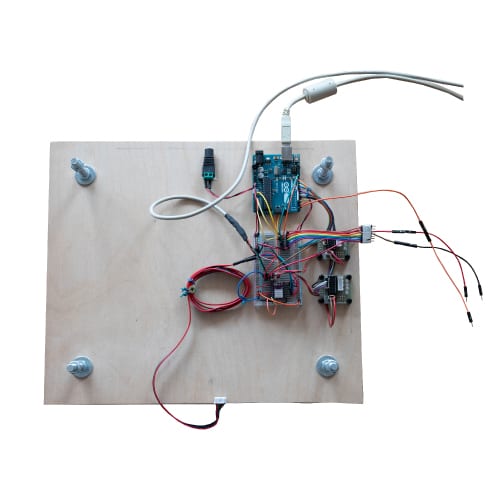
Die Hauptprobleme der vorherigen Prototypen waren die unkontinuierliche Bewegung der Platte und des Armes, sodass es schwer war, ein konsistentes Ergebnis zu erhalten. Außerdem war die Konstruktion nicht stabil und schwer zu transportieren. Diese Probleme können durch eine robustere Konstruktion und das Verwenden von elektrischen Steppermotoren behoben werden: Für eine stabile Rotation ist die Platte auf einem Druckkugellager montiert. Für eine gleichmäßige und kontrollierte Kraftübertragung des Motors auf die Platte wird ein Gummiriemen und 3D gedruckte Räder verwendet.
Um komplexere Formen zu erzeugen, sind nun zwei Arme aus Alu-Profilen an zwei Motoren montiert, die sich verschieden schnell drehen können. Durch die Interaktion der beiden Arme entstehen deutlich komplexere Muster. Die Art und Position der Muster kann durch verschiedene Verbindung der Alu-Profile variiert werden. So kann beispielsweise die Größe der erzeugten Form durch verkürzen oder verlänger des „Hebels“ beeinflusst werden.
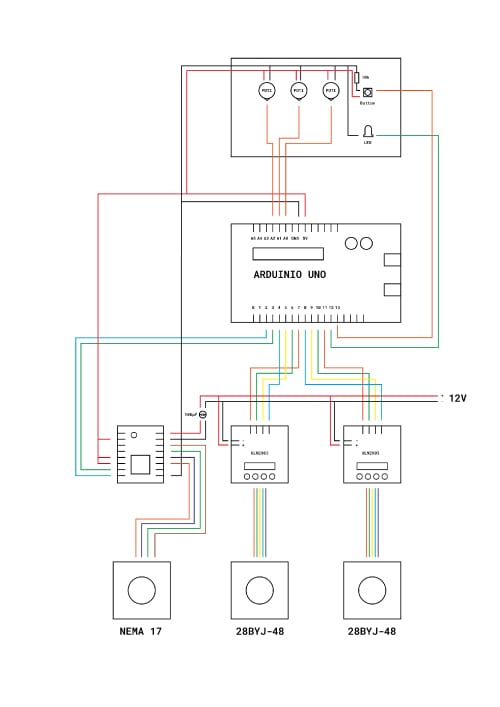
Die Bewegung der Platte und der Arme wird auch hier über einen Computer gesteuert und kann entwerder vorprogrammiert werden, oder über die Potentiometer auf der Bedienungseinheit direkt von Hand geändert werden. So kann schnell und einfach getestet und experimentiert werden, welche Einstellungen interessante Ergebnisse liefern.
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
-
13
Prototyp 04 -
14
Bauplan Prototyp 04 -
15
Schaltplan Prototyp 04 -
16
Stifthalterung mit eigenem Servo zur Druckvariation -
17
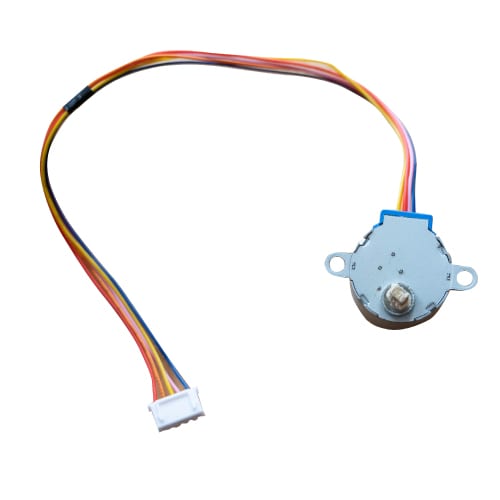
28BYJ-48 Stepper Motor für die Arme -
18
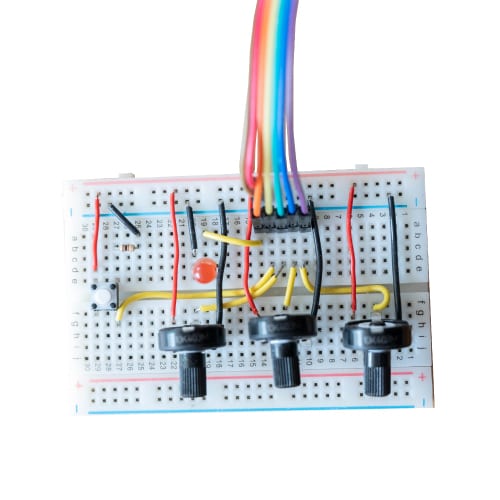
Breadboard mit Potentiometern als Steuerungseinheit -
19
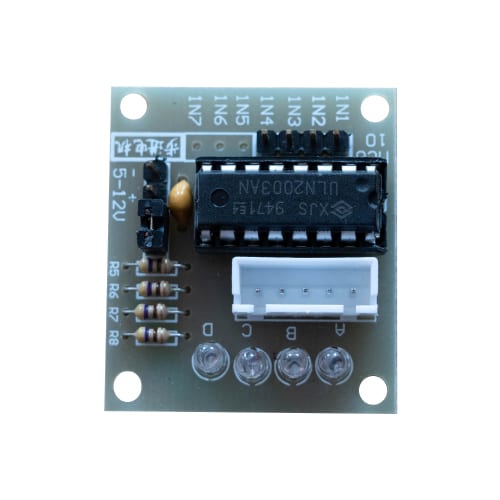
Driver Board für 28BYJ-48 -
20
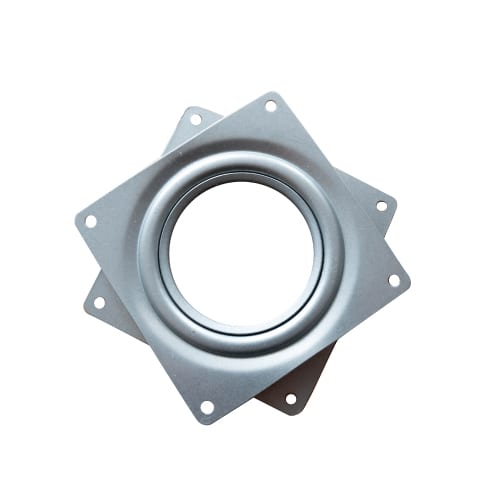
Druckkugellager -
21
NEMA17 Steppermotor als Plattenantrieb -
22
Steuerungseinheit mit Arduino -
23
Drehplatte mit Übersetzung
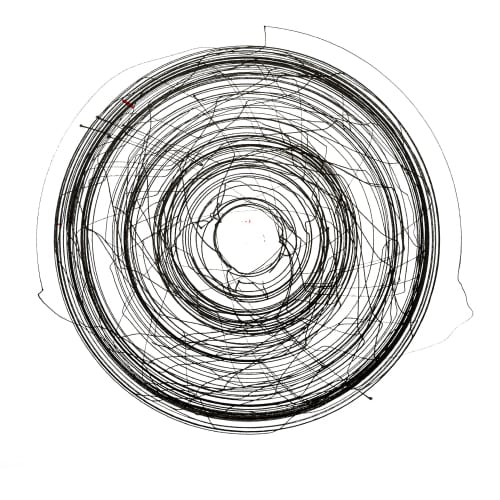
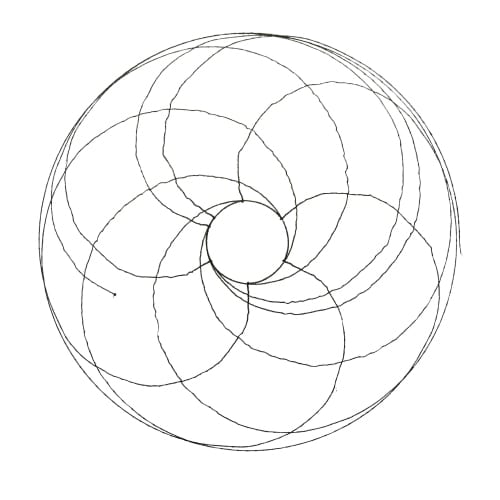
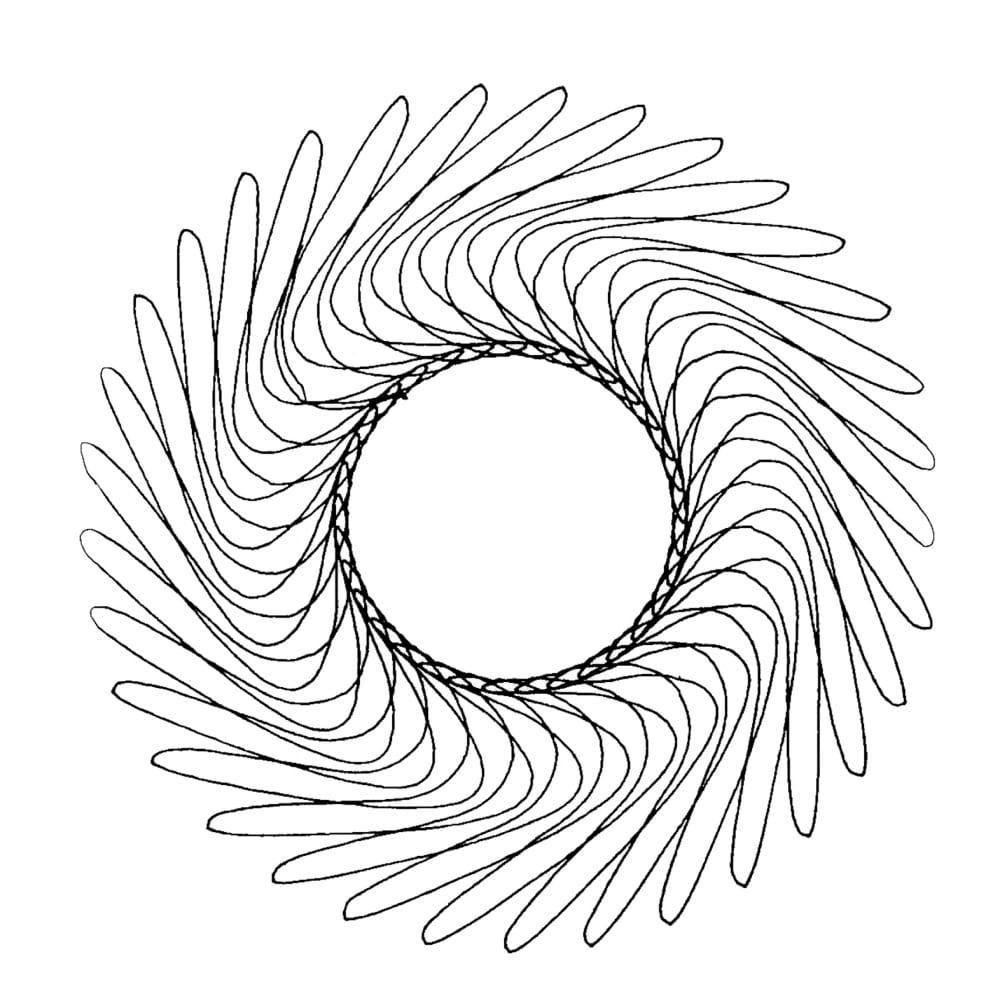
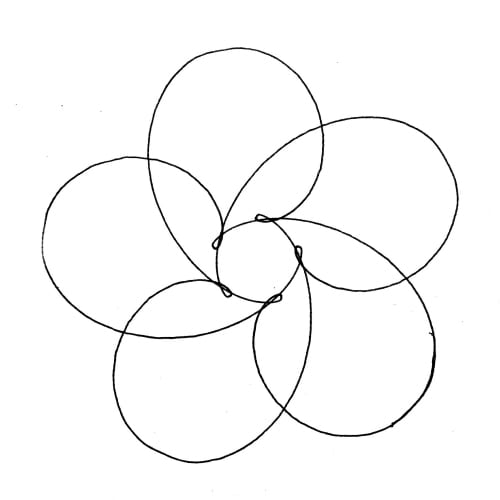
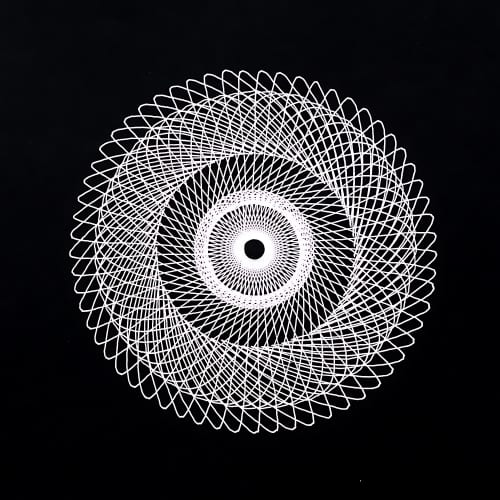
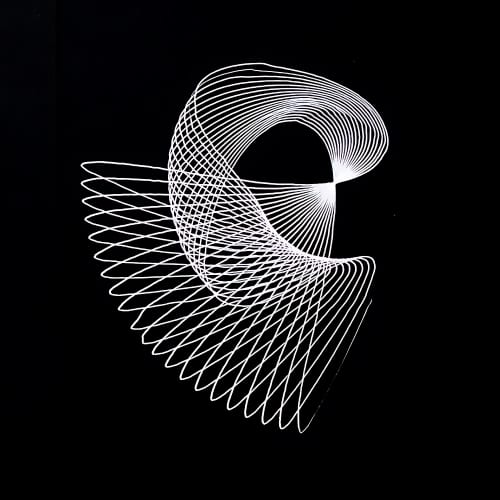
Ergebnisse
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
-
24
Ergebnis 01: Assymetrische Form -
25
Ergebnis 02: Symmetrische Form -
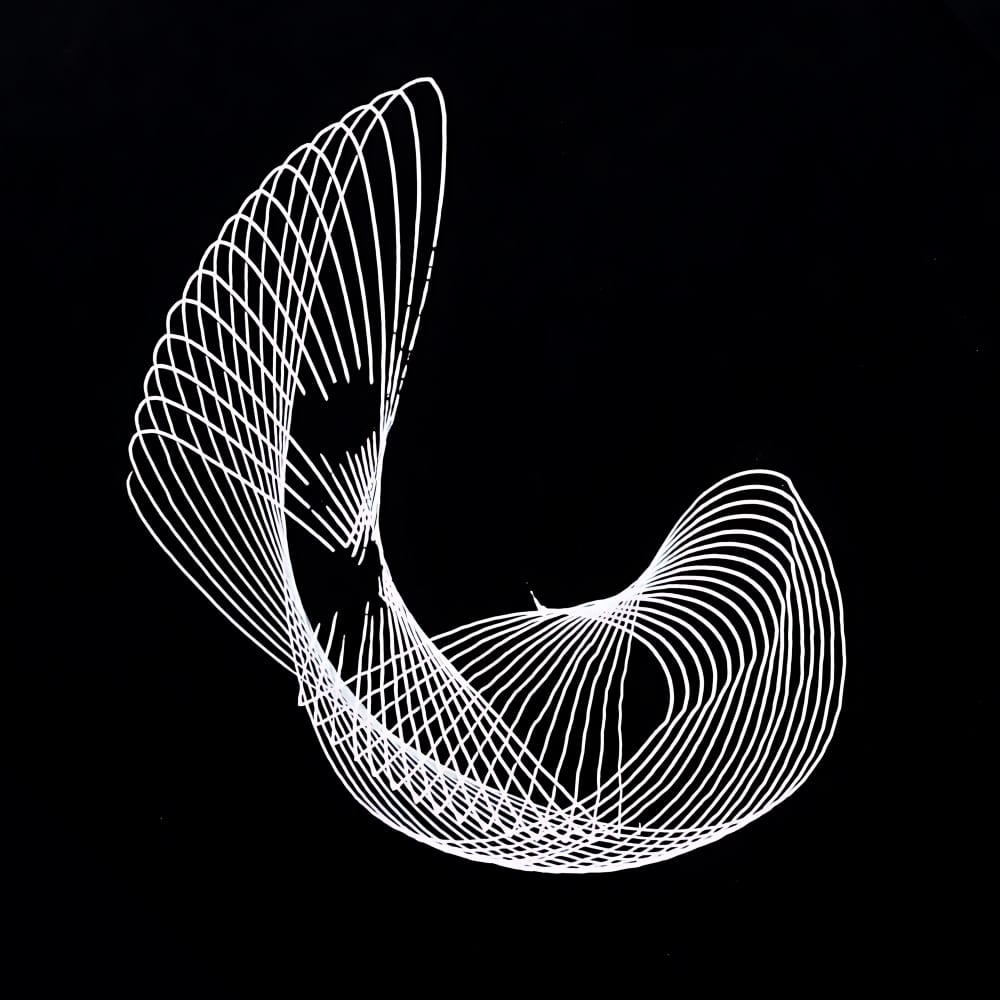
26
Ergebnis 03 -
27
Ergebnis 04 -
28
Ergebnis 05 -
29
Ergebnis 06